蘇州數控車床自動上下料培訓
智能化、仿生化是工業機器人的發展趨勢,隨著材料、控制等技術不斷發展,實驗室產品越來越多的產品化,逐步應用于各個場合。伴隨移動互聯網、物聯網的發展,多傳感器、分布式控制的精密型工業機器人將會越來越多,逐步滲透制造業的方方面面,并且由制造實施型向服務型轉化。工業機器人先大規模使用的區域將會在如今的發達地區。隨著產業轉移的進行,發達地區的制造業需要提升。基于工人成本不斷增長的現實,工業機器人的應用成為優先選擇的替代方式。未來我國工業機器人的大范圍應用將會集中在廣東、江蘇、上海、北京等地,其工業機器人擁有量將占全國一半以上。日益增長的工業機器人市場以及巨大的市場潛力吸引世界著名機器人生產廠家的目光。當前,我國進口的工業機器人主要來自日本,但是隨著諸如“機器人”類似的具有自有知識產權的企業不斷出現,越來越多的工業機器人將會由中國制造。以上便是自動化展小編為大家整理的相關內容,如果大家對這方面比較感興趣,可以到自動化展參觀交流。2022年11月30日-12月2日,自動化展將于深圳國際會展中心(寶安新館)隆重開幕,將以“跨界+芯+智造”為創新理念,展會將匯聚1,200個企業及品牌參展。無錫加工中心自動上下料哪家好,請選擇無錫法思特機器人自動化有限公司。蘇州數控車床自動上下料培訓
尺寸檢查是外觀檢查的一種。在判斷零件或產品是否已按照規格進行過加工或組裝時,它起著重要作用。這些尺寸檢查可以通過圖像處理實現自動化:測量零件或產品的尺寸測量O形圈的平均內徑或外徑或中心坐標測量金屬零件的圓度或角度測量邊緣和標簽的位置測量片材/薄膜產品的寬度尺寸測量是檢查的基礎;但是,由于需要大量時間和精力,因此很難引入。隨著工廠自動化(FA)的擴展,使用圖像處理的尺寸測量已經增加。本頁介紹使用圖像處理進行尺寸測量的基本原理,優點和實際應用。山東自動上下料備件無錫法思特機器人自動化有限公司集設計,生產,調試,售后為一體,服務于工業機器人集成應用!
汽車裝配車間是勞動密集型車間,在人力資源日趨緊張的情況下,運用機器人集成機器視覺可以有效實現工件特征復雜、來料狀態沒有精確定位的裝配件的自動裝配。協作機器人與周邊作業人員有很好的交互環境,相對于傳統機器人更適用于勞動密集型的總裝車間。協作機器人輕巧緊湊、節省空間、易于重新部署在多個應用站位中,不會改變產線的生產布局,無需安全圍欄隔離也能運行,可與產線員工實現共同協作。1外飾條裝配作業要求本文以勞動強度大的汽車側圍外飾條壓緊工序為研究對象,外飾條需在16℃以上溫度、()以上壓力下才能達到90%的膠粘浸潤率,如圖1所示。由于操作員工無法長時間施加()的壓力,易于疲勞作業,無法保證裝配質量,本工序采用協作機器人自動作業,以改善生產線人機狀態和操作環境,提升員工工作舒適性和滿意度。
桁架機器人的組成縱觀研究工作主要集中在智能型的機器人上,對于中小企業所需的經濟、簡單實用型機器人的研究不夠重視;此外,還有很多研究工作比較關注機器人的機構和靈活性,很少涉及與數控機床通信控制的協同作業方面。因此,作為多年來埋頭于數控沖床機器人的廠家康道智能來說,在意識到這個問題所在的同時,山東康道開展研發出了更加靈活數控車床機器人,通過一次性機械調整達到對某一系列零件的自動裝夾和卸料,通過盡量使用簡單標準件和機械定位壓低成本,通過調換不同的機器人抓提高機器人的柔性等方面研究將具有較高的技術創新水平和較大的工程應用價值。不僅能為大型的企業制造福利,更為中小企業節省了不少費用。工業機器人主要有控制系統、驅動系統、執行機構以及位置檢測系統(有的配有數據遠傳裝置)等組成。可以用于工業生產中,用于移動各種材料、零件、工具或裝置,通過可編程序動作來執行種種任務,具有編程能力的多功能機器人。工業機器人在制造業中的應用不但能夠提升產品品質,提高竟爭力度,使用機器人,還能提升車間形象,質量得到保證,更可準確計算產量,增強企業意爭力度。例如:以注塑周期30秒計算,用人工取出產品*天約為2800模。無錫法思特機器人專業從事缸體工業機器人機床上下料工作站設計!
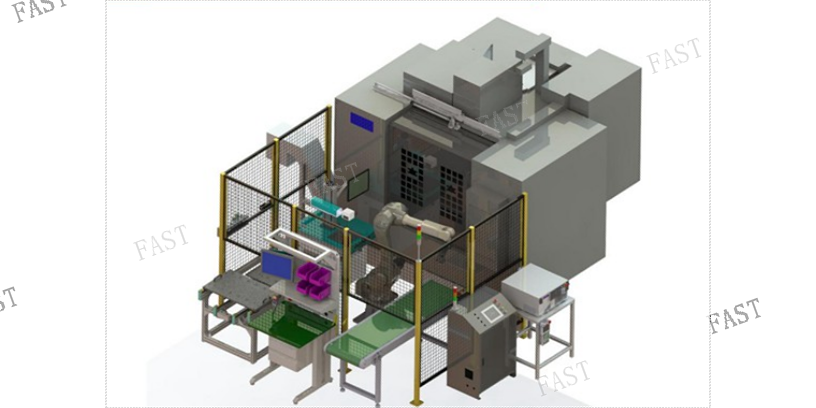
機床上下料的自動化實現方式主要有桁架機械手和關節機器人這兩種方式。之前看的比較多的是桁架機械手,有人說自動上下料難點在于工位的布置,也就是產線的規劃問題,很多公司要求緊湊化生產,常見的是U字型和圓盤式循環型。車間不夠大,毛坯流進,成品流出的管理和搬運都是比較費空間的。接下來來看一下關節機器人為應對這些問題有什么優缺點。關節機器人——用于機械加工機床上下料的關節機器人采用的軸數一般為6軸,重復定位精度為±,常用的負載重量在8-75kg。BOERT機器人多型號展示機床上下料機器人一般分為一對一、一對二(機床面對面擺放)、一對三(機床擺成品字形),如果想要一臺關節機器人對多臺機床上下料,需要加上地面軌道,可實現一臺關節機器人對多臺機床自動上下料。 無錫法思特機器人專業從事數控車床自動上下料設計,生產,調試,售后為一體,服務于工業機器人集成應用。常熟數控車床自動上下料方案設計
無錫非標自動上下料設計哪家專業,請選擇無錫法思特機器人自動化有限公司。蘇州數控車床自動上下料培訓
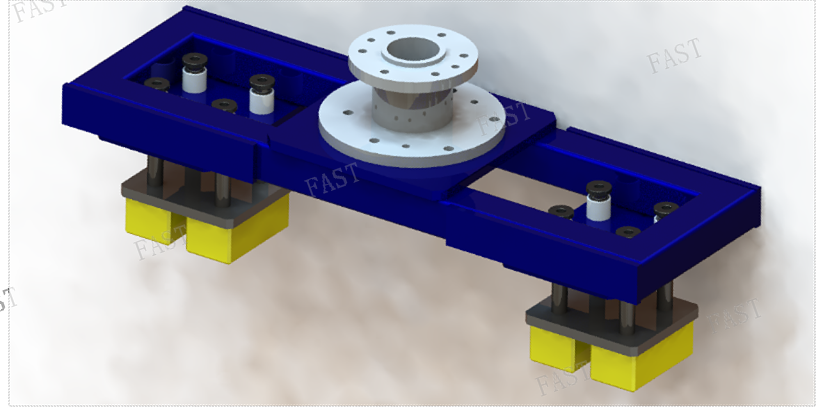
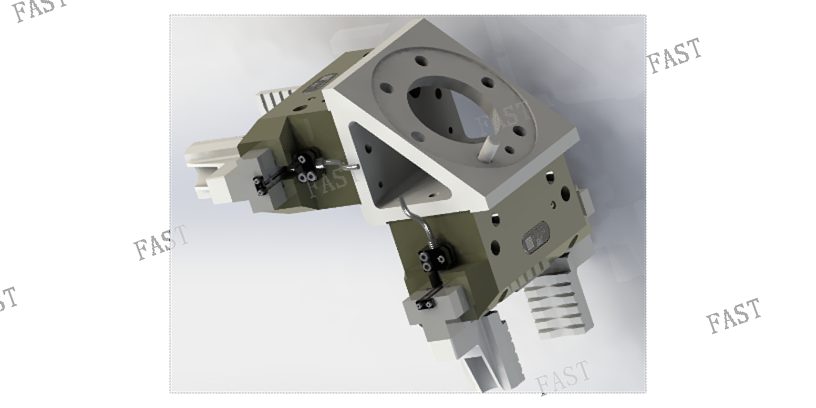
數控機床機械手的上料過程的動作:數控機械手臂沿X軸運動到工件取料位置的上方后停止,然后Z軸向下運動使張開的手爪剛好能抓住工件,閉合手爪抓住工件后,使Z軸再向上運動到高度,然后再沿X軸方向運動到工作臺卡盤正上方,然后Z軸向下運動把工件裝入卡盤或工裝內。然后卡盤夾緊,Z軸上升到超出機床防護罩上方,X軸再運動到等待位置等待機床完成工件的加工。2)數控機床機械手下料過程的動作:完成工件加工后,X軸運動到卡盤的正上方,Z軸向下運動使手爪剛好能抓住工件,然后給氣壓使手爪合并抓住工件,卡盤松開,Z軸向上運動到合適的高度,然后沿X軸方向運動直至Z軸到放料位置,Z軸下降到放料點,張開手爪放料完成后提升Z軸,再轉入下一個上料過程。 蘇州數控車床自動上下料培訓
- 安徽壓機自動上下料價格 2025-06-19
- 山東加工中心自動上下料培訓 2025-06-19
- 張家港壓機自動上下料售后服務 2025-06-19
- 新吳區自動上下料品牌排行 2025-06-19
- 蘇州數控車床自動上下料平臺 2025-06-19
- 山東油壓機自動上下料設備制造 2025-06-19
- 無錫自動上下料聯系方式 2025-06-19
- 濱湖區加工中心自動上下料方案設計 2025-06-19
- 昆山工業機器人自動上下料設備 2025-06-19
- 昆山油壓機自動上下料哪家好 2025-06-19
- 青島逆流閉式冷卻塔服務熱線 2025-06-19
- 嘉強XC3000S激光數控系統怎么用 2025-06-19
- 嘉定區附近硬水軟管式微濾膜哪個好 2025-06-19
- 井蓋探測儀檢測系統 2025-06-19
- 徐匯區購買消防蝶閥銷售電話 2025-06-19
- 揚州全自動洗碗機好用嗎 2025-06-19
- 貴陽模具臥式加工中心 2025-06-19
- 上海低噪音減速機排名 2025-06-19
- 北京工業自動化視覺檢測設備生產廠家 2025-06-19
- 吉林食品級化工桶 2025-06-19