海南哪里有目標(biāo)識(shí)別編號(hào)
SpeedDP的出現(xiàn)則正好解決了這一問(wèn)題,它是一個(gè)基于瑞芯微的深度學(xué)習(xí)算法開(kāi)發(fā)平臺(tái),提供從數(shù)據(jù)標(biāo)注、模型訓(xùn)練、測(cè)試驗(yàn)證到RockChip嵌入式硬件平臺(tái)模型部署的可視化AI開(kāi)發(fā)功能。平臺(tái)支持本地化服務(wù)器部署,高校、特殊單位等數(shù)據(jù)敏感的用戶無(wú)需擔(dān)心數(shù)據(jù)信息泄露的問(wèn)題。高校等單位可以通過(guò)模型訓(xùn)練和模型評(píng)估等功能,打造一個(gè)符合需求的AI模型,來(lái)幫助進(jìn)行海量的數(shù)據(jù)標(biāo)注,這不僅將節(jié)約大量的數(shù)據(jù)標(biāo)注時(shí)間,更重要的是能夠幫助提升自身算法在RK3588圖像處理板的檢測(cè)識(shí)別能力。如何提升無(wú)人機(jī)的AI識(shí)別精度?海南哪里有目標(biāo)識(shí)別編號(hào)
目標(biāo)識(shí)別
物聯(lián)網(wǎng)與人工智能的融合是一個(gè)多維度的技術(shù)整合過(guò)程,涉及數(shù)據(jù)的收集、分析和智能決策。這一融合的基礎(chǔ)在于如何有效地利用物聯(lián)網(wǎng)設(shè)備收集的海量數(shù)據(jù),并借助人工智能技術(shù)進(jìn)行深入分析和應(yīng)用。物聯(lián)網(wǎng)設(shè)備,包括各種傳感器和執(zhí)行器,是數(shù)據(jù)收集的前線。它們能夠?qū)崟r(shí)監(jiān)測(cè)環(huán)境參數(shù)、設(shè)備狀態(tài)和用戶行為,生成大量數(shù)據(jù)。這些數(shù)據(jù)是后續(xù)分析和決策的基礎(chǔ)。人工智能在數(shù)據(jù)分析方面的能力是其與物聯(lián)網(wǎng)融合的關(guān)鍵。通過(guò)機(jī)器學(xué)習(xí)和深度學(xué)習(xí)算法,可以從物聯(lián)網(wǎng)設(shè)備收集的數(shù)據(jù)中識(shí)別模式、預(yù)測(cè)趨勢(shì)和發(fā)現(xiàn)異常。這些分析結(jié)果為智能決策提供了依據(jù)。吉林高效目標(biāo)識(shí)別型號(hào)如何精確的識(shí)別弱小目標(biāo)?

無(wú)人機(jī)在農(nóng)業(yè)領(lǐng)域能夠?qū)崿F(xiàn)高效率的施肥、播種等操作。但是不同的作業(yè)環(huán)境對(duì)于無(wú)人機(jī)的工作性能要求不一樣,同樣的方案在平原地區(qū)適用,在高原地區(qū)就不行。因此針對(duì)于特殊作業(yè)環(huán)境需要制定不同的智慧化方案。像青藏高原這樣地貌復(fù)雜、低氣壓、大溫差的特點(diǎn),參與智能化工作的各個(gè)部件需要符合這樣作業(yè)環(huán)境特點(diǎn)的性能要求。不比平原的一馬平川,高原由于環(huán)境復(fù)雜,地形起伏對(duì)于無(wú)人機(jī)的飛行也需要進(jìn)行控制,無(wú)論是高度還是速度甚至距離都需要進(jìn)行嚴(yán)格限制,防止出現(xiàn)撞機(jī)等事故。因此,這個(gè)方面的智慧化建設(shè)就需要無(wú)人機(jī)具備智能避障的功能,無(wú)人機(jī)需要在高速度或者遠(yuǎn)距離的情況下識(shí)別樹(shù)木、電線桿、石頭等障礙物,并能夠?qū)崿F(xiàn)避障。
成都慧視推出的深度學(xué)習(xí)算法開(kāi)發(fā)平臺(tái)SpeedDP,它的主要功能就是幫助進(jìn)行算法模型的測(cè)試驗(yàn)證,進(jìn)行快速的針對(duì)大量數(shù)據(jù)的AI自動(dòng)標(biāo)注,然后提升自身算法能力。在無(wú)人機(jī)智能炮彈測(cè)試驗(yàn)證中,通過(guò)對(duì)原始算法的模型訓(xùn)練,能夠不斷評(píng)估算法的能力,然后對(duì)新的打擊數(shù)據(jù)集目標(biāo)進(jìn)行AI自動(dòng)標(biāo)注,讓算法在學(xué)習(xí)中不斷變得聰明。通過(guò)SpeedDP的應(yīng)用,能夠極大減少整個(gè)測(cè)試驗(yàn)證所需時(shí)間,減少人力成本支出,減少項(xiàng)目開(kāi)發(fā)周期,讓工程師不再為繁瑣的圖像標(biāo)注浪費(fèi)時(shí)間將更多的精力放在更重要的領(lǐng)域。慧視圖像處理板都有哪些接口?
eVTOL是指電動(dòng)垂直起降飛行器,大力開(kāi)展eVTOL試點(diǎn),是對(duì)低空經(jīng)濟(jì)的強(qiáng)動(dòng)力注入,而無(wú)人機(jī)正是這一領(lǐng)域的關(guān)鍵選擇之一。無(wú)人機(jī)在低空經(jīng)濟(jì)中扮演者重要角色,隨著應(yīng)用領(lǐng)域的不斷增多,未來(lái)無(wú)人機(jī)的數(shù)量將呈式增長(zhǎng),屆時(shí)eVTOL起降中心將聚集眾多各式各樣的無(wú)人機(jī),如何高效有序的讓無(wú)人機(jī)彼此工作而不互相干擾是行業(yè)值得思考的一件事。當(dāng)許多無(wú)人機(jī)需要同時(shí)起飛執(zhí)行不同的任務(wù)時(shí),如果操控不當(dāng),或者收到外力影響,就容易出現(xiàn)事故,而人為的反應(yīng)畢竟有延后,不可能做到完全的補(bǔ)救操作,因此無(wú)人機(jī)自身的規(guī)避措施建設(shè)一樣重要。如何選擇和的目標(biāo)識(shí)別用圖像處理板?山東省時(shí)省力目標(biāo)識(shí)別鄭重承諾
應(yīng)急救援的識(shí)別模塊怎么購(gòu)買?海南哪里有目標(biāo)識(shí)別編號(hào)
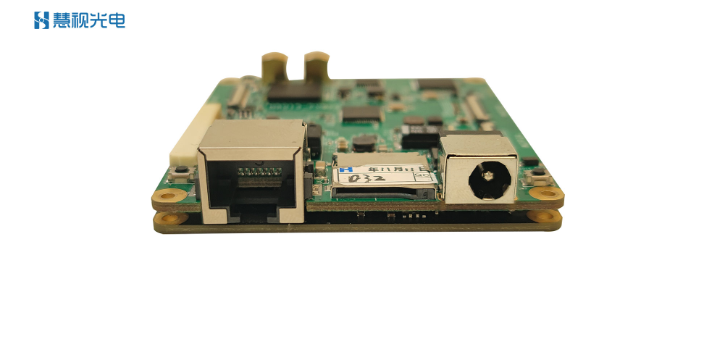
在無(wú)人機(jī)識(shí)別這個(gè)領(lǐng)域,應(yīng)用十分廣,因此針對(duì)于這方面的教學(xué)必不可少。目前國(guó)產(chǎn)化的識(shí)別傳感器當(dāng)屬瑞芯微的RK3588,因此許多院校都會(huì)選擇采用RK3588來(lái)進(jìn)行教學(xué),成都慧視開(kāi)發(fā)的Viztra-HE030圖像處理板就是利用RK3588打造而成,能夠根據(jù)不同規(guī)格的相機(jī)深度定制接口。(不同接口的RK3588圖像處理板)如果院校想進(jìn)一步節(jié)約時(shí)間提升效率,成都慧視還可以提供訓(xùn)練學(xué)習(xí)設(shè)備的整套方案。在高性能Viztra-HE030圖像處理板的基礎(chǔ)上,根據(jù)需求幫助選擇合適的相機(jī),并且針對(duì)算法這塊,我們能夠提供一個(gè)高效的深度學(xué)習(xí)算法開(kāi)發(fā)平臺(tái)SpeedDP,這個(gè)平臺(tái)能夠通過(guò)大量的識(shí)別檢測(cè)算法模型訓(xùn)練開(kāi)發(fā),實(shí)現(xiàn)對(duì)新數(shù)據(jù)集的快速AI自動(dòng)圖像標(biāo)注,一方面省去大量手動(dòng)標(biāo)注工作,另一方面幫助提升算法性能。海南哪里有目標(biāo)識(shí)別編號(hào)
- 湖北企業(yè)目標(biāo)識(shí)別辦公平臺(tái) 2025-07-19
- 廣東省時(shí)省力目標(biāo)識(shí)別遠(yuǎn)程控制 2025-07-19
- 廣西無(wú)源目標(biāo)識(shí)別情況 2025-07-19
- 天津國(guó)產(chǎn)化圖像標(biāo)注什么價(jià)格 2025-07-19
- 江西快速目標(biāo)識(shí)別解決方案 2025-07-19
- 小體積圖像識(shí)別模塊應(yīng)用 2025-07-19
- 吉林多系統(tǒng)適配目標(biāo)識(shí)別遠(yuǎn)程控制 2025-07-19
- 廣西國(guó)產(chǎn)目標(biāo)識(shí)別創(chuàng)意 2025-07-18
- 湖北智能化目標(biāo)識(shí)別創(chuàng)意 2025-07-18
- 云南低壓線目標(biāo)識(shí)別工具 2025-07-18
- 湖北企業(yè)目標(biāo)識(shí)別辦公平臺(tái) 2025-07-19
- 周界雷達(dá)報(bào)警系統(tǒng)廠家報(bào)價(jià) 2025-07-19
- 陜西精度高千兆網(wǎng)絡(luò)授時(shí)能力 2025-07-19
- 重慶裝充電樁怎么充電 2025-07-19
- 廣東省時(shí)省力目標(biāo)識(shí)別遠(yuǎn)程控制 2025-07-19
- 臨沂一站式工廠能源管理平臺(tái) 2025-07-19
- 重慶移動(dòng)終端管理系統(tǒng)生產(chǎn)商 2025-07-19
- 南京智能化智慧園區(qū)網(wǎng)絡(luò)覆蓋設(shè)備銷售廠 2025-07-19
- 湖北可視化微機(jī)五防電力安全防護(hù) 2025-07-19
- 安防周界雷達(dá)平均價(jià)格 2025-07-19