-
惟精環(huán)境藻類智能分析監(jiān)測系統(tǒng),為水源安全貢獻科技力量!
-
快來擁抱無線遠程打印新時代,惟精智印云盒、讓打印變得如此簡單
-
攜手共進,惟精環(huán)境共探環(huán)保行業(yè)發(fā)展新路徑
-
惟精環(huán)境:科技賦能,守護綠水青山
-
南京市南陽商會新春聯(lián)會成功召開
-
惟精環(huán)境順利通過“江蘇省民營科技企業(yè)”復(fù)評復(fù)審
-
“自動?化監(jiān)測技術(shù)在水質(zhì)檢測中的實施與應(yīng)用”在《科學(xué)家》發(fā)表
-
熱烈祝賀武漢市概念驗證中心(武漢科技大學(xué))南京分中心掛牌成立
-
解鎖流域水質(zhì)密碼,“三維熒光水質(zhì)指紋”鎖定排污嫌疑人!
-
重磅政策,重點流域水環(huán)境綜合治理資金支持可達總投資的80%
常州搬運機械手生產(chǎn)商
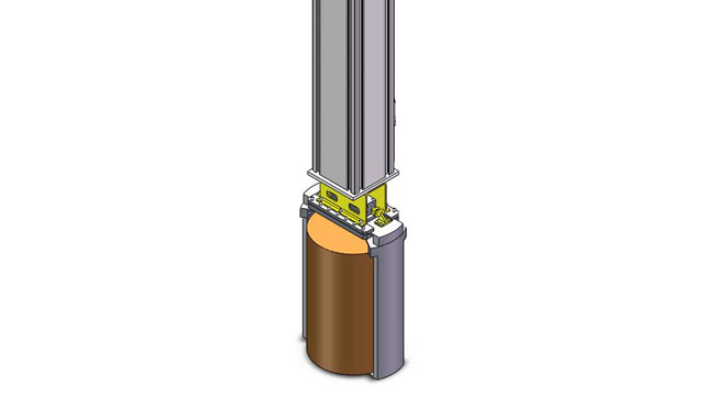
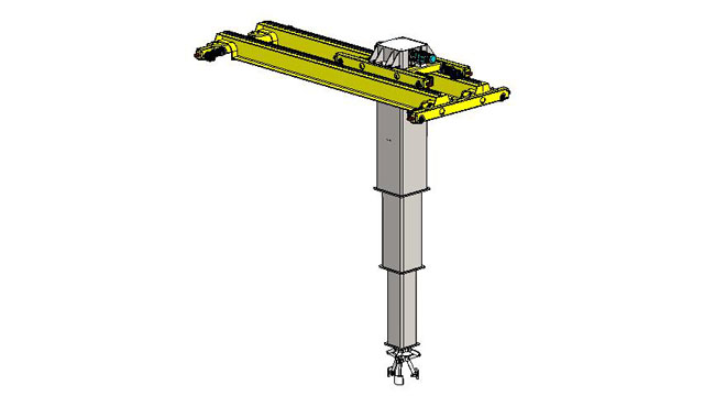
一、搬運機械手簡介:三坐標搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行, 可用伺服電機快速響應(yīng);2.連續(xù)工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設(shè)有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三坐標搬運機械手,PLC控制。南京高銳特生產(chǎn)。常州搬運機械手生產(chǎn)商
一、搬運機械手簡介:三坐標搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、 導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應(yīng);2.連續(xù)工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設(shè)有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。臺州品質(zhì)搬運機械手三坐標搬運機械手,PLC控制。適合于物料自動化轉(zhuǎn)運。
一、搬運機械手簡介:三坐標搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應(yīng);2.連續(xù)工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運; 5.各機構(gòu)均設(shè)有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設(shè)有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。
一、搬運機械手簡介:三坐標搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應(yīng);2.連續(xù)工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6. 氣動抓取機械手設(shè)有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。南京搬運機械手,南京。
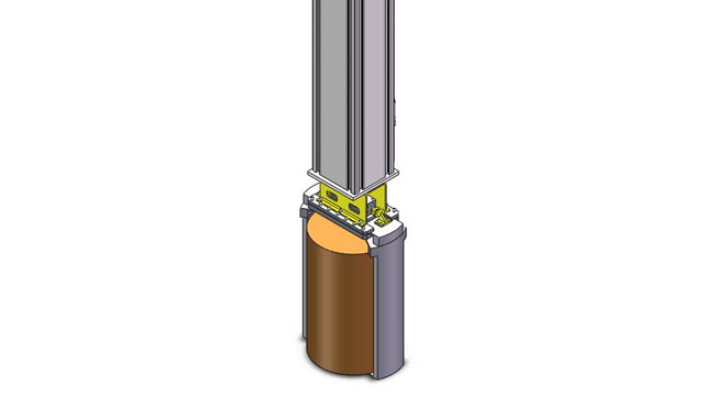
一、搬運機械手簡介:三坐標搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。 二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應(yīng);2.連續(xù)工作時間長; 3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設(shè)有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三、搬運機械手產(chǎn)品構(gòu)成:三坐標搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運行機構(gòu),采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構(gòu),采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構(gòu),采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現(xiàn)機械手的開閉,爪指采用內(nèi)爪式,傳感器檢測元件+機械限位;控制系統(tǒng),通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發(fā)送指令給個執(zhí)行元件按既定動作去執(zhí)行。三坐標搬運機械手,PLC控制。南京生產(chǎn)。常州搬運機械手生產(chǎn)商
三坐標搬運機械手,自動化程度高,南京生產(chǎn)。常州搬運機械手生產(chǎn)商
一、搬運機械手簡介:三坐標搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、 Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應(yīng);2.連續(xù)工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設(shè)有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。常州搬運機械手生產(chǎn)商
- 武漢購買防爆卷揚機 2025-06-20
- 杭州智能防爆卷揚機報價 2025-06-20
- 湖州固定防爆卷揚機 2025-06-20
- 品質(zhì)防爆卷揚機生產(chǎn)商 2025-06-20
- 河南小型防爆卷揚機批發(fā) 2025-06-20
- 江蘇電動防爆卷揚機多少錢 2025-06-20
- 蘇州礦用防爆卷揚機哪家好 2025-06-20
- 黃石銷售防爆卷揚機 2025-06-20
- 河南手動防爆卷揚機廠家 2025-06-20
- 南京多功能防爆卷揚機哪家好 2025-06-20
- 無錫KAPP-NILES磨齒機市場價格 2025-06-20
- 蘇州定做DDC控制柜保養(yǎng) 2025-06-20
- 福建食品行業(yè)層流罩風(fēng)速調(diào)節(jié)方法 2025-06-20
- 河北抓斗激光掃描歡迎選購 2025-06-20
- 惠州防洪閘應(yīng)急物資 2025-06-20
- 武漢購買防爆卷揚機 2025-06-20
- 杭州code readervericode 2025-06-20
- 杭州灌膠機 2025-06-20
- 松江區(qū)常規(guī)波峰焊接 2025-06-20
- 浙江直埋ADSS光纜 2025-06-20