湖州搬運機械手怎么選
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。二、產品特點: 1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。智能三坐標搬運機械手,南京高銳特起重機械有限公司。湖州搬運機械手怎么選
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運; 5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。上海電動搬運機械手智能三坐標搬運機械手哪家生產,南京高銳特起重機械有限公司。
一、搬運機械手簡介: 三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6. 氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三坐標搬運機械手生產廠家,南京高銳特有限公司。
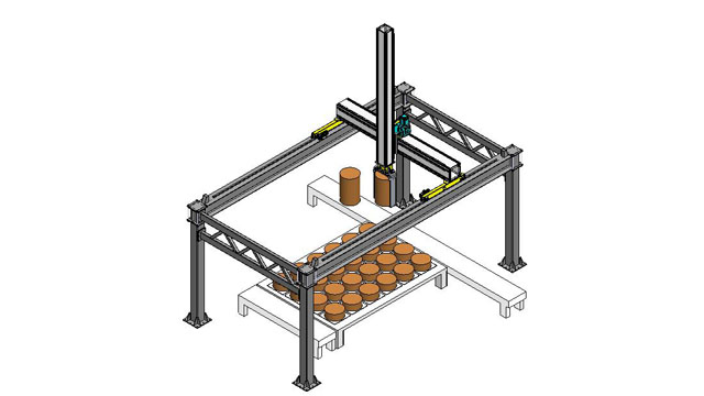
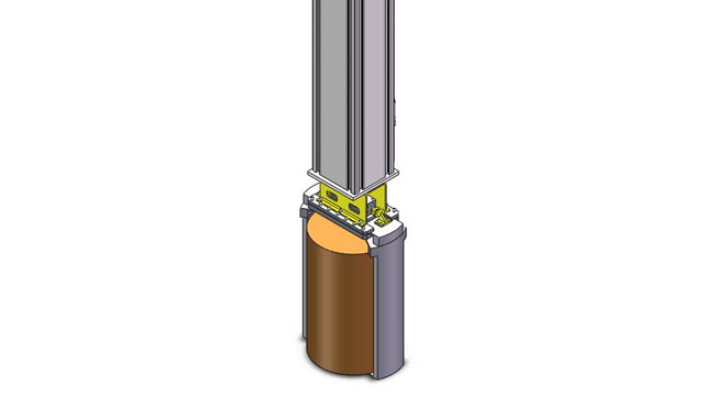
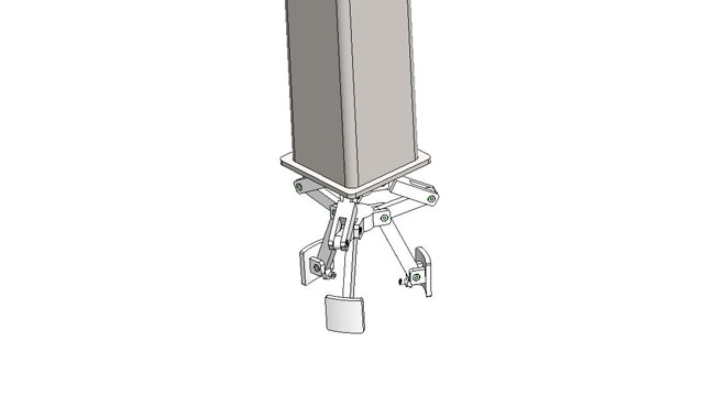
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。 二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運; 5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三、搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。智能三坐標搬運機械手哪家生產?智能搬運機械手供應商
搬運機械手,哪家生產,南京。湖州搬運機械手怎么選
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三、搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。湖州搬運機械手怎么選
南京高銳特起重機械有限公司是一家集研發、制造、銷售為一體的****,公司位于東溝鎮府前街118號,成立于2006-11-13。公司秉承著技術研發、客戶優先的原則,為國內起重輸送機械,自動起重輸送,智能起重輸送,電動葫蘆的產品發展添磚加瓦。公司主要經營起重輸送機械,自動起重輸送,智能起重輸送,電動葫蘆等產品,產品質量可靠,均通過機械及行業設備行業檢測,嚴格按照行業標準執行。目前產品已經應用與全國30多個省、市、自治區。南京高銳特起重機械有限公司研發團隊不斷緊跟起重輸送機械,自動起重輸送,智能起重輸送,電動葫蘆行業發展趨勢,研發與改進新的產品,從而保證公司在新技術研發方面不斷提升,確保公司產品符合行業標準和要求。南京高銳特起重機械有限公司以市場為導向,以創新為動力。不斷提升管理水平及起重輸送機械,自動起重輸送,智能起重輸送,電動葫蘆產品質量。本公司以良好的商品品質、誠信的經營理念期待您的到來!
- 上海自動化防爆卷揚機報價 2025-06-21
- 銷售防爆卷揚機 2025-06-21
- 浙江多功能防爆卷揚機生產 2025-06-21
- 礦井防爆卷揚機廠家 2025-06-21
- 南京直銷防爆卷揚機哪家好 2025-06-21
- 濟寧銷售防爆卷揚機 2025-06-21
- 嘉興銷售防爆卷揚機 2025-06-21
- 蘇州定制防爆卷揚機 2025-06-21
- 嘉興定制防爆卷揚機 2025-06-21
- 武漢工業防爆卷揚機 2025-06-21
- 南京超聲波點焊機性能 2025-06-21
- 廣州鋁合金真空腔體 2025-06-21
- 無錫切割機企業 2025-06-21
- 青浦區本地管式膜廠家電話 2025-06-21
- 四川直插式煙氣CO分析儀報價 2025-06-21
- 陜西制造超聲波清洗采購 2025-06-21
- 廣東多功能行星減速機怎么樣 2025-06-21
- 業務機床電主軸售后服務 2025-06-21
- 徐州直銷激光切割加工現貨 2025-06-21
- 海南380V無油靜音空壓機廠家價格 2025-06-21