常州搬運機械手廠家
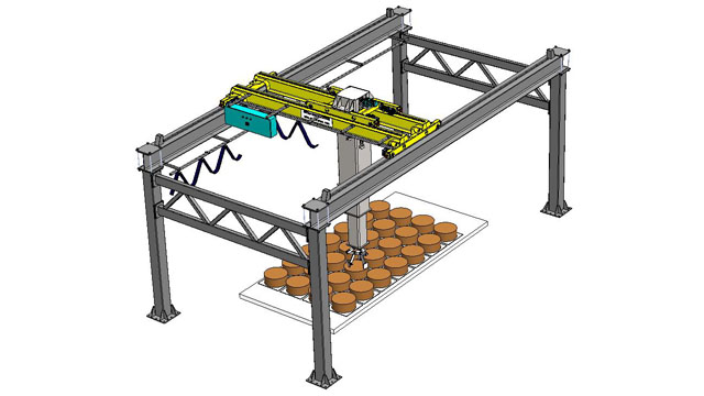
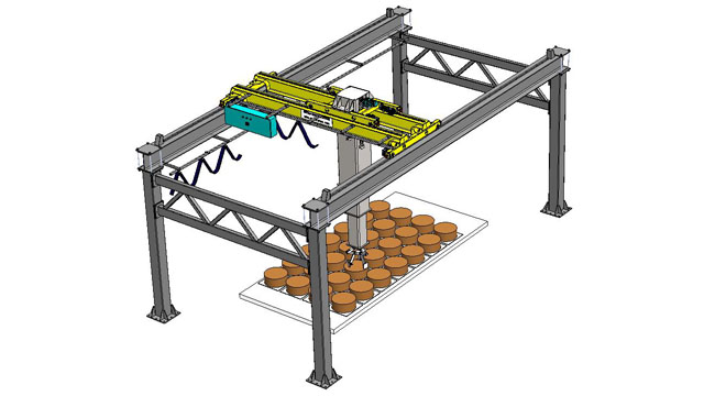
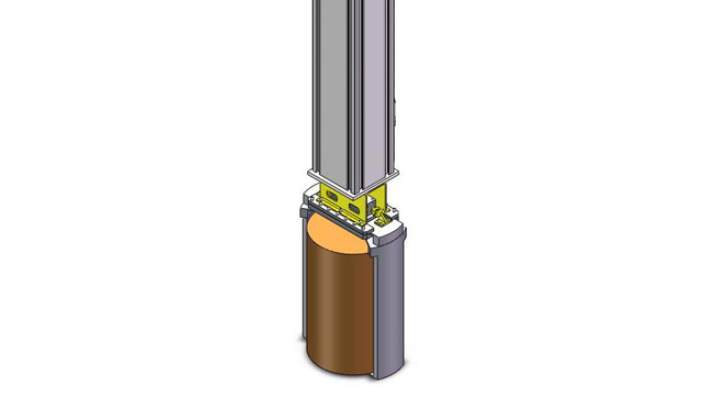
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。 二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等; 7.誤操作保護裝置。 三、搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。三坐標搬運機械手,PLC控制。南京高銳特起重機械有限公司生產。常州搬運機械手廠家
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。 二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。 三、 搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。蕪湖智能搬運機械手三坐標搬運機械手生產廠家,南京高銳特起重機械有限公司。
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。 二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。 三、搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位; Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。 二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。 三、搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、 Z軸升降機構、抓取機械手、導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。三坐標搬運機械手,PLC控制。適合于物料自動化轉運。
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。 二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm; 4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三、搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。南京搬運機械手,南京高銳特有限公司。常州搬運機械手廠家
三坐標搬運機械手生產廠家,南京高銳特有限公司。常州搬運機械手廠家
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。 二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。 三、搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位; Z軸方向運行機構,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。常州搬運機械手廠家
南京高銳特起重機械有限公司是以提供起重輸送機械,自動起重輸送,智能起重輸送,電動葫蘆內的多項綜合服務,為消費者多方位提供起重輸送機械,自動起重輸送,智能起重輸送,電動葫蘆,公司位于東溝鎮府前街118號,成立于2006-11-13,迄今已經成長為機械及行業設備行業內同類型企業的佼佼者。南京高銳特起重致力于構建機械及行業設備自主創新的競爭力,南京高銳特起重將以精良的技術、優異的產品性能和完善的售后服務,滿足國內外廣大客戶的需求。
- 金華大型防爆卷揚機 2025-06-09
- 河南定制防爆卷揚機供應商 2025-06-09
- 濟南工業防爆卷揚機 2025-06-09
- 蘇州礦用防爆卷揚機批發 2025-06-09
- 定制防爆卷揚機 2025-06-09
- 河南自動化防爆卷揚機價格 2025-06-09
- 上海固定防爆卷揚機生產 2025-06-09
- 小型防爆卷揚機哪家好 2025-06-09
- 嘉興多功能防爆卷揚機 2025-06-09
- 濟南電動防爆卷揚機 2025-06-09
- 電動牙刷切角包膜機性能 2025-06-09
- 沙井AOI緩存機生產廠家 2025-06-09
- 河南五軸位移手動滑臺模組 2025-06-09
- 冷熱源暖通節能方案大概價格 2025-06-09
- 水導激光旋切供應 2025-06-09
- 嘉興輸送設備設計 2025-06-09
- 通風口按需定制 2025-06-09
- 廣州全自動珍珠棉復合機現價 2025-06-09
- 普陀區銷售消防蝶閥銷售價格 2025-06-09
- 桌面小五軸方法 2025-06-09