重慶電池包視覺鏡頭有哪些
SLAM(SimultaneousLocalizationandMapping),也就是同時定位與地圖構建,它是指搭載特定傳感器的車輛、無人機等移動機器人,在沒有環境先驗信息(什么是先驗信息?可以自己查一下)的情況下,在運動過程中,估計自己的運動狀態,同時建立環境模型的一系列任務。目前大家接觸比較多的,已經將SLAM技術應用于實際生活中的,就是掃地機器人了。我們來想一下:掃地機器人來到一個陌生的環境后,是怎樣去清掃一個垃圾呢?一個直觀的想法就是機器人先確定自己的位置,然后確定垃圾相對于自身的位置,這樣就有了一個起點和終點,機器人只需要從起點移動到終點就能清掃這個垃圾了。但是這是很直觀的想法,而這個想法的前提是:我們清楚房間的地圖構造,這樣我們才能更好地完成垃圾清掃的任務。所以掃地機器人需要完成的流程應該是:了解自己周圍的環境,構建房間地圖,確認自己與垃圾的位置,然后規劃路線,移動過去,完成清掃。而這整個流程中,構建地圖、進行自身的定位,就是咱們SLAM的主要任務了。物流視覺鏡頭,識別條碼,快速分揀。重慶電池包視覺鏡頭有哪些

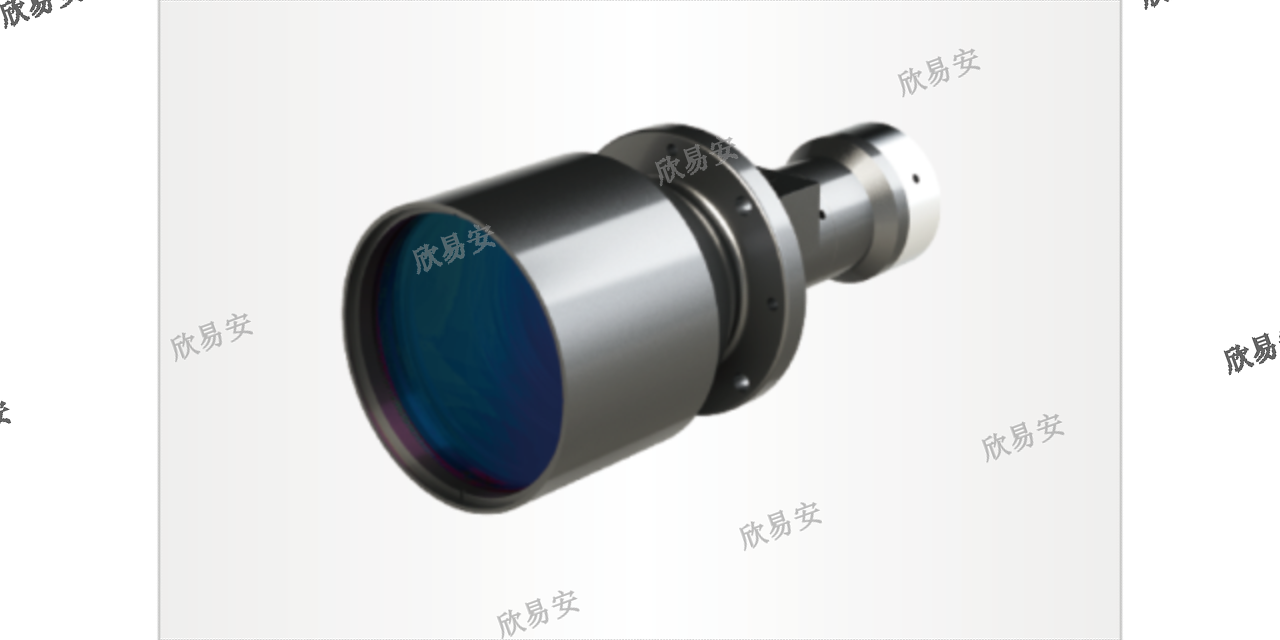
遠心鏡頭主要彌補非遠心鏡頭的以下特點;1)由于被測量物體不在同一個測量平面,而造成放大倍率的不同;2)鏡頭畸變大3)視差也就是當物距變大時,對物體的放大倍數也改變;4)鏡頭的解析度不高;5)由于視覺光源的幾何特性,而造成的圖像邊緣位置的不確定性。遠心和非遠心各自的優點:普通鏡頭優點:成本低,實用,用途廣。普通鏡頭缺點:放大倍率會有變化,有視差。普通鏡頭應用:大物體成像。遠心鏡頭的優點:放大倍數恒定,不隨景深變化而變化,無視差。遠心鏡頭的缺點:成本高,尺寸大,重量重。遠心鏡頭的應用:度量衡方面,基于CCD方面的測量,微晶學河南光伏視覺鏡頭哪個好視覺鏡頭與光源搭配,成像效果更佳。
汽車作為現代生活必不可少的工具,它的每一個零部件都關系著一輛汽車的性能、質量,關系著它的安全性,所以對汽車零部件的檢測是制造中一步至關重要的環節,視覺系統(特別是雙遠心鏡頭)起到了重要的作用。檢測對象:汽車發動機保險絲盒塑料框架檢測要求:檢測有無多膠缺膠檢出**小0.1mm的缺陷視野150*100解決方案:DTCM35FH-240H-AL(DTCM系列雙遠心鏡頭)+DTCL-240-1W-G+29M全畫幅相機成果:檢測良品率98.5%,檢測時間為2S/1PCS,**提高工作效率。
超大視野雙遠心鏡頭的視野中心及四周均勻性好且有極低畸變的成像,非常適合高精度工件外觀檢測及尺寸測量。檢測對象:智能手機蓋板測量檢測要求:尺寸測量匹配29MP(全畫幅44mm)大面陣相機大視野FOV240mm高精度檢測難點:視野很大,且視野中心和邊緣需要保持非常一致的分辨率同時對于測量來說,畸變需要極低景深較大解決方案:DTCM35FH-240H-AL(DTCM系列雙遠心鏡頭)+DTCL-240-1W-G(遠心平行背光源)檢測結果:視野的中心及邊緣的分辨率一致,且畸變極低(0.004%);搭配平行背光源,比起傳統的平板背光源,邊緣更加銳利,灰度過渡像素更少,同時視野中心和周邊的亮度保持均勻,比較大限度發揮了鏡頭的高分辨率特點,極大的提高了測量的精度;有效光圈數為F10.3,在保證了分辨率的情況下,景深也達到了項目需求;視覺鏡頭遠程控制,操作更便捷。
一、波長、變焦與否鏡頭的工作波長和是否需要變焦是比較容易先確定下來的,成像過程中需要改變放大倍率的應用,采用變焦鏡頭,否則采用定焦鏡頭就可以了。關于鏡頭的工作波長,常見的是可見光波段,也有其他波段的應用。是否需要另外采取濾光措施?單色光還是多色光?能否有效避開雜散光的影響?把這幾個問題考慮清楚,綜合衡量后再確定鏡頭的工作波長。二、特殊要求優先考慮結合實際的應用特點,可能會有特殊的要求,應該先予明確下來。例如是否有測量功能,是否需要使用遠心鏡頭,成像的景深是否很大等等。景深往往不被重視,但是它卻是任何成像系統都必須考慮的。視覺鏡頭低功耗,長期使用更節能。重慶電池包視覺鏡頭有哪些
視覺鏡頭對接追溯系統,數據聯動。重慶電池包視覺鏡頭有哪些
鏡頭相當于充當晶狀體這一環節,簡而言之,鏡頭主要的作用就是聚光。為什么要聚光?比如說在大晴天用放大鏡生火,你會發現陽光透過放大鏡聚集到一點上,也就是說,想通過一塊小面積的芯片去承載這么一片區域就不得不使用鏡頭聚焦。焦距是從鏡頭的中心點到膠平面上所形成的清晰影像之間的距離。焦距的大小決定著視角的大小,焦距數值小,視角大,所觀察的范圍也大;焦距數值大,視角小,觀察范圍小。根據焦距能否調節,可分為定焦鏡頭和變焦鏡頭兩大類。重慶電池包視覺鏡頭有哪些
- 淮南變倍視覺鏡頭怎么樣 2025-07-30
- 滁州變倍視覺鏡頭特點 2025-07-30
- 廣州電池包視覺鏡頭有哪些 2025-07-30
- 河南3C視覺鏡頭電話 2025-07-30
- 天津新能源視覺鏡頭有哪些 2025-07-30
- 廣州工業場景搬運視覺鏡頭維修 2025-07-30
- 南京CE認證視覺鏡頭生產企業 2025-07-30
- 青浦區UL認證視覺鏡頭特點 2025-07-29
- 貴州電池包視覺鏡頭種類 2025-07-29
- 楊浦區UR認證視覺鏡頭設備廠家 2025-07-29
- 上海洗脫機公司 2025-07-30
- 安徽乘客電梯轎廂 2025-07-30
- 甘肅蒸發冷空調 2025-07-30
- 內蒙古漿液泵循環泵 2025-07-30
- 中山臺達變頻器VFD900CP43L-00 2025-07-30
- 鎮江重型皮帶輸送機技術參數 2025-07-30
- 江蘇新能源驅動器 2025-07-30
- 安慶全自動施肥機供應商 2025-07-30
- 南山區快速全自動錫膏印刷機品牌 2025-07-30
- 虎丘區本地Elmo驅動器五星服務 2025-07-30